
3. 초점 맞추기 (계속)
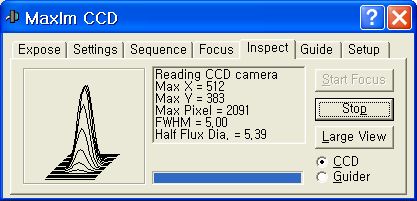
대충 맞았으면, 중지하고 Binning을 1로 한 다음, 밝은 별 하나만 있는 부근을 드래그-드롭하여 사각형으로 선택한 다음 이미지를 찍습니다. 이제 선택한 별이 빠르고 좀더 크게 보일 겁니다. (Binning을 줄이고 전화면의 일부분이니까…) 이미지가 계속 보여주는 상태에서 Inspect로 갑니다.(윗 그림) 그 곳에서는 그 별의 초점 정밀도를 그래프와 수치로 표현해 줍니다. 그래프가 가장 뾰족해지고, 밝기수치가 가장 높아지도록 초점을 조절합니다.(시간과 감각적인 손놀림?이 필요합니다. ROBO Focus등의 모터세트를 사면 자동으로 맞출 수도 있습니다.)
4. 대상 잡기
마운트의 GOTO 기능이나 성도를 보고 촬영하고자 하는 대상을 맞춥니다. Focus기능에서 Binning을 3으로 놓고 노출을 1초 정도만 주면 거의 모든 대상이 CCD에서 확인가능합니다.
5. 오토가이드
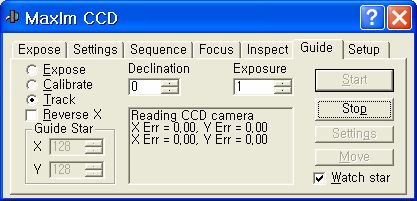
Focus기능에서 CCD선택을 Guider로 합니다. Start focus를 누르면 이젠 오토가이드 칩에 보이는 화면을 보여줍니다. 가이드성으로 쓸만한 밝은 별이 있나 확인합니다. 오토가이드의 노출은 가대에 따라 틀리지만, 2초~5초 정도면 큰 무리가 없습니다. 마땅한 가이드 별이 없으면 구도를 조금 이동하던지, 카메라를 회전시켜야 합니다. 이제 Guide 기능으로 가서 .(아래그림)
Expose를 누릅니다. 오토가이드 칩의 전체이미지가 보이는데, 그 중에서 제일 밝은 별을 하나 클릭하고 그 다음에
Calibrate를 누릅니다. 미리 정해준 시간동안 마운트를 상하좌우 이동하고 각각 이미지를 찍어 이동량을 학습하는 루틴입니다.
Track을 누릅니다. Watch Star를 체크 해 두면 가이드성을 추적하는 화면을 계속 보여 줍니다.
이제 오토가이드가 프로그램의 백그라운드에서 계속 가이드를 하게 됩니다. Main CCD로 이미지를 촬영하는 일만 남았습니다.
 CCD 이미지 촬영 순서 3/3
CCD 이미지 촬영 순서 3/3
 CCD 이미지 촬영 순서 1/3
CCD 이미지 촬영 순서 1/3